Comau + EUREKA SYSTEM (case107)
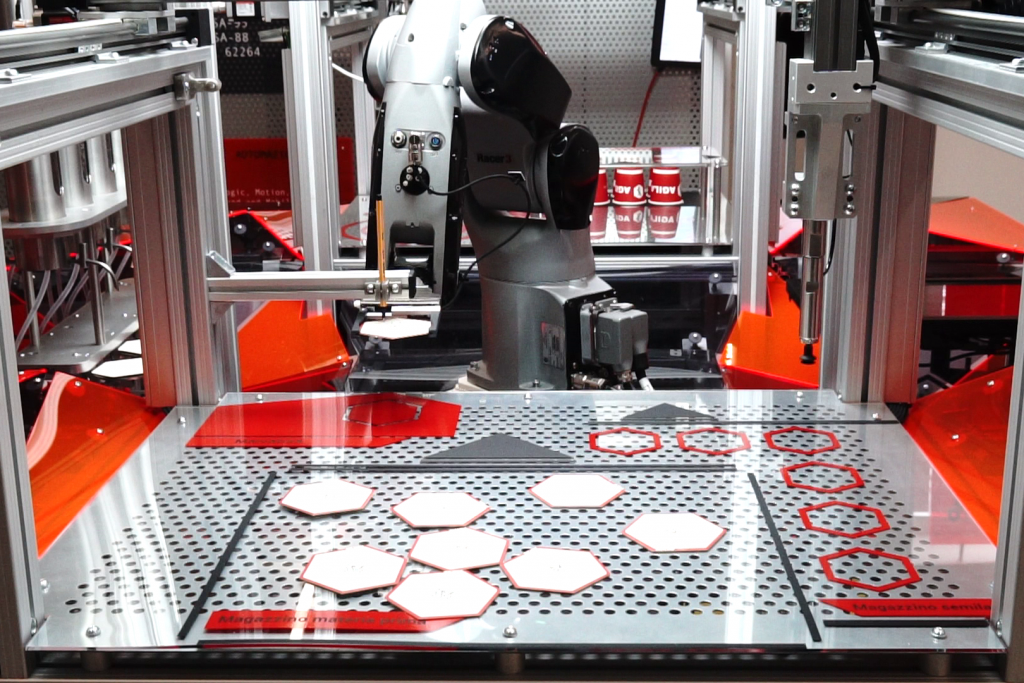
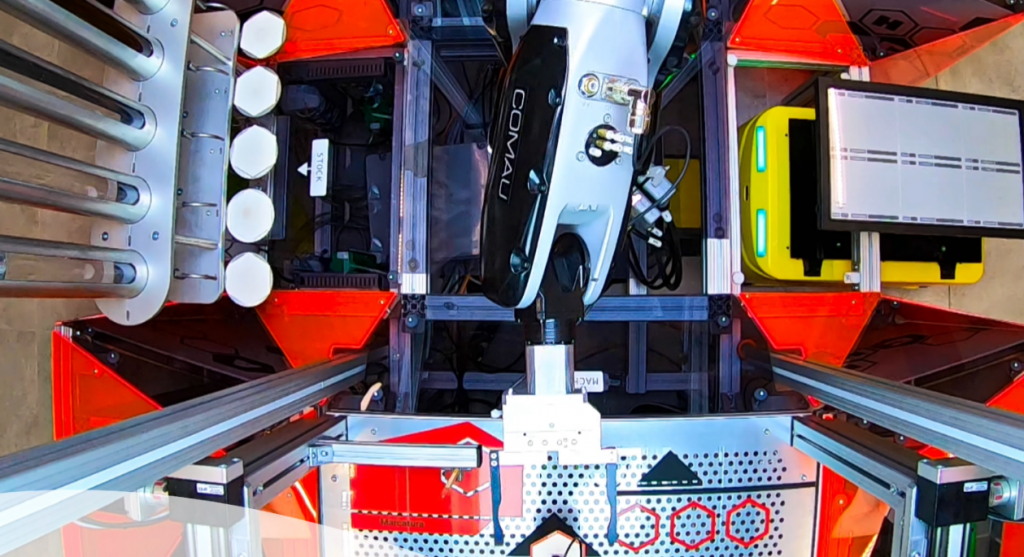
Launching an order, firstly the Comau Racer-3-0.63 receives from the MES the instructions regarding its handling missions and Robot-to-Robot interactions, which serve to grab and move the cup and the coaster.
Agilab approach
Agilab is the concrete expression of Eureka System’s skills. It meets the need for process innovation of those manufacturing companies that look to the future according to the requirements of Industry 4.0.
The laboratory, reproducing a scaled-down production process, acts as a pole of exemplification, simulation, research, and in-depth analysis of Smart Factory and Digital Transformation. Equipped with its own Manufacturing Execution System, Agilab sports a series of 4.0 technologies, including various sensors, Artificial Vision, Edge Computing, Data Analysis, fixed Cartesian and Anthropomorphic Robotic Systems, and Jobot – the mobile robot with a fleet management software. Basically, Agilab is a dynamic industrial process of Smart Manufacturing, with its own Manufacturing Execution System, its product varieties, and its customisations on commission; all technologies are integrated in a digitally interconnected environment, with its own tailor-made Manufacturing Execution System.
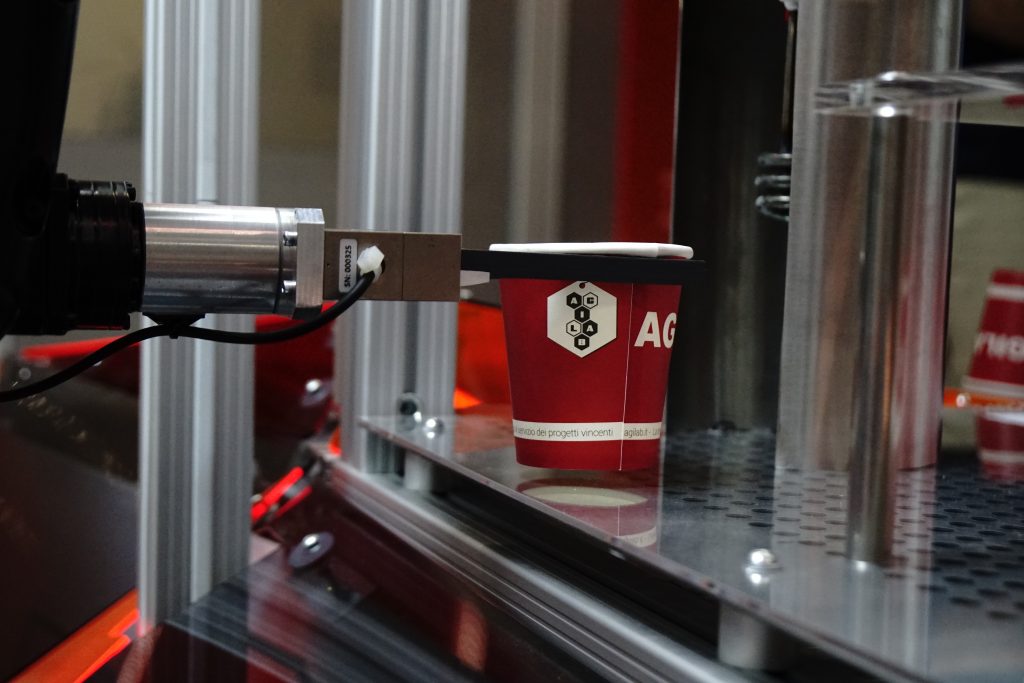
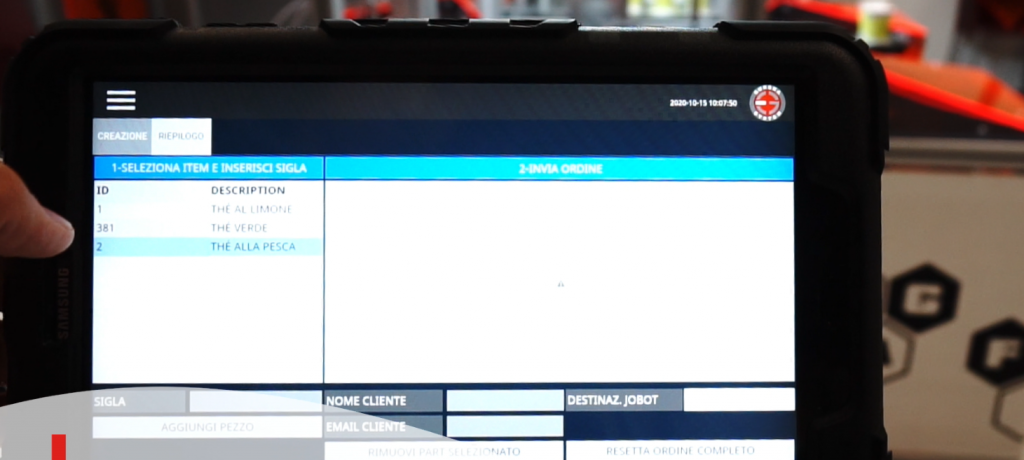
Currently, Agilab is programmed to replicate a hot beverage production process, thus preparing the ordered drink and delivering the cup along with a coaster personalised with the receiver’s name.
CAM-Robot
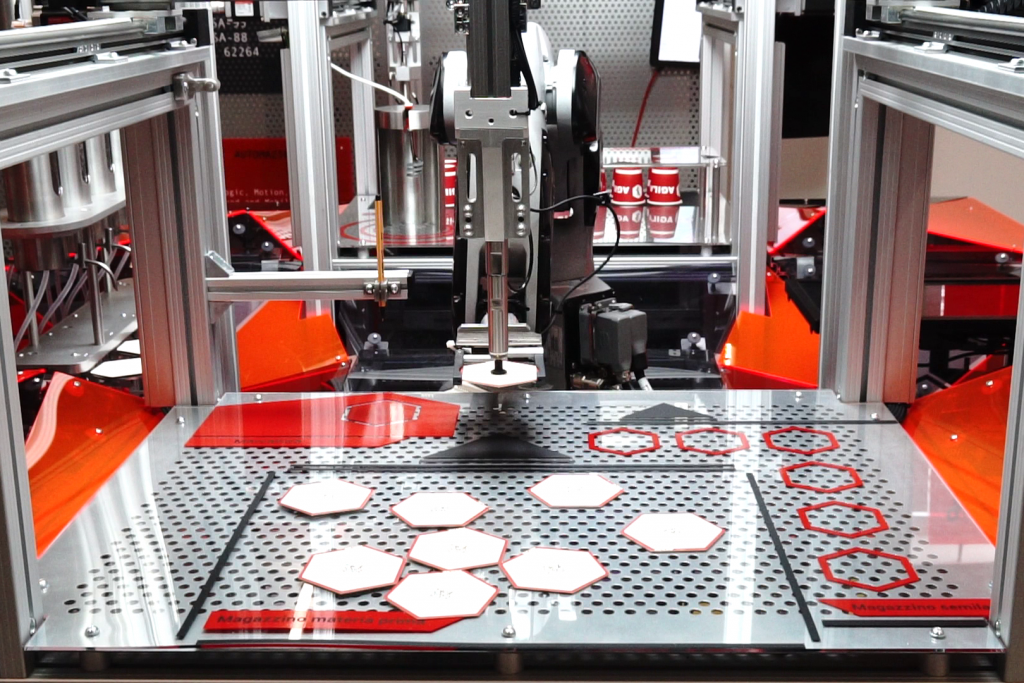
CAM-Robot is Agilab articulated robot experimentation; fully powered by Keba, this Comau Racer-3 robot is interfaced with Eureka System’s G-code (DIN66025) interpreter software to generate the high-precision toolpaths that the robot must follow to write on the coaster.
As a side note, the robot gripper was specifically created by Additive Manufacturing (3D printing in polymer material).
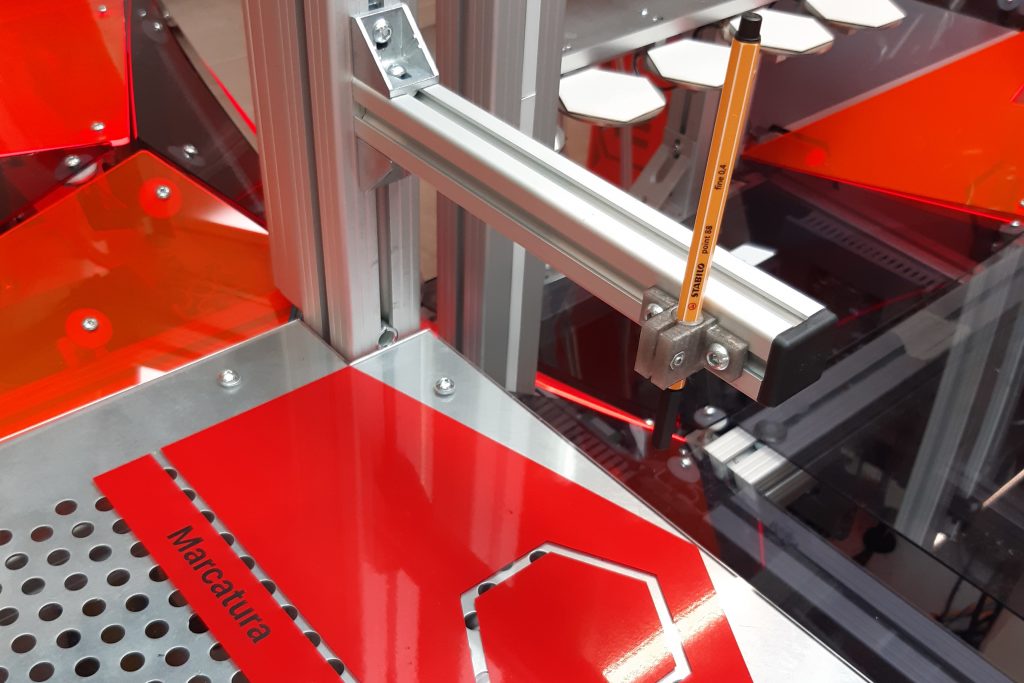
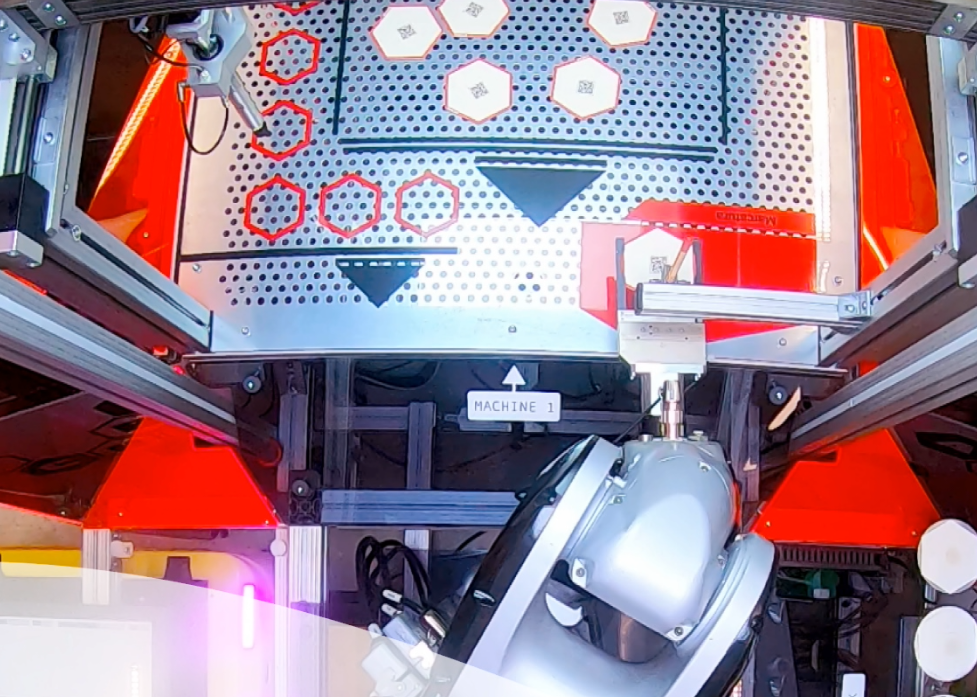
During a specific step of the production process, the robot customises the coaster by writing on it the name of the person who ordered the drink. Seeing as the required letters differ from order to order, every time the robot must be able to follow a previously unknown complex trajectory. Interestingly, during the writing process the marker remains immobile, while the robot writes on the coaster directing it along the instructed fixed-angle 3D path.
With the CAM-Robot Eureka System has developed a robot capable to move objects by executing both common handling missions and easily customisable machining G-code toolpaths for CNC finishing works.
the six-axis anthropomorphic robot
performs Handling missions for manipulating raw materials and semi-finished products
interacts with the warehouses (raw materials, semi-finished products, finished products)
can follow Machining G-code customised toolpaths for Computer Numerical Control (CNC) finishing works to marking and personalise the order